
Jednocześnie HS520A ma dobrą dokładność pomiaru, bardzo szeroki zakres częstotliwości i doskonałą stabilność, która może spełnić wymagania pomiarowe większości urządzeń i materiałów ultradźwiękowych.
Ultradźwiękowy analizator impedancji służy głównie do pomiaru charakterystyk impedancji wszystkich rodzajów urządzeń ultradźwiękowych, w tym: ceramiki piezoelektrycznej, przetworników, myjek ultradźwiękowych, urządzeń do pomiaru odległości, silników ultradźwiękowych, przepływomierzy ultradźwiękowych, defektoskopów ultradźwiękowych i innych urządzeń ultradźwiękowych.
Parametr pomiaru
W przypadku urządzenia piezoelektrycznego jego impedancja zmienia się wraz z częstotliwością. Pełny opis urządzenia piezoelektrycznego wymaga niezwykle złożonej sieci obwodów, a prostsza sieć jest wybierana w interesującym nas paśmie częstotliwości (w tym cewki indukcyjne, rezystory, kondensatory), bardziej kompletny opis właściwości urządzenia piezoelektrycznego. Udowodniono, że sieć jest zbudowana przy użyciu cewek, rezystorów i kondensatorów zawartych w następującej sieci, a wymagane charakterystyki sieci można lepiej odtworzyć.
W przypadku ogólnego urządzenia piezoelektrycznego nie ma żadnego innego rezonansu w dziedzinie częstotliwości od określonej częstotliwości rezonansowej. W dziedzinie częstotliwości w pobliżu częstotliwości rezonansowej urządzenie można symulować za pomocą wielu cewek indukcyjnych, rezystorów i kondensatorów, a odpowiadający mu obwód równoważny pokazano poniżej. Pokazane w następujący sposób:
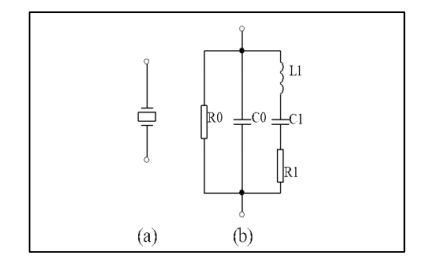
Rycina 1: Ogólny schemat zastępczy urządzenia piezoelektrycznego
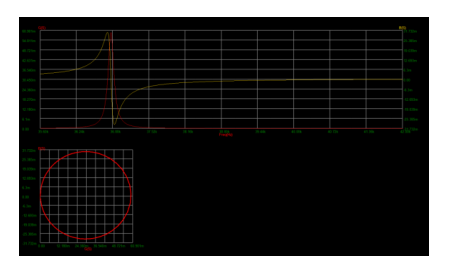
Ryc. 2: Charakterystyka dopuszczalności urządzeń piezoelektrycznych
Na ryc. 1 (a) jest symbolem wskazującym urządzenie piezoelektryczne, a (b) jest równoważnym obwodem urządzenia piezoelektrycznego. Gdzie C0 jest kondensatorem statycznym, R1, C1 i L1 oznaczają odpowiednio rezystancję, pojemność i indukcyjność w impedancji dynamicznej, a R0 oznacza rezystancję izolacji materiału. W powyższym równoważnym obwodzie, ponieważ obwód jest wyrażany równolegle, wygodnie jest zastosować analizę admitancji, tak aby admitancja całego obwodu wynosiła Y, a gałąź równoległa (składająca się z R0, C0, zwana admitancją statyczną). Y0, oddział serii
Droga (złożona z R1, L1 i C1, zwana dopuszczeniem dynamicznym) jest dopuszczona do Y1.
Y = Y0 + Y1 Y0 = 1 / R0 + 1 / (j2πfC0), Y1 = 1 / {R1 + j2πf L1 + 1 / (j2πfC1)}
Obliczenia można wykorzystać do uzyskania zmiany całkowitej admitancji Y i dynamicznej admitancji Y1 o częstotliwości f (charakterystyka admitancji-częstotliwości). Y i Y1 są wektorami, które powinny zostać rozłożone na części rzeczywiste (przewodnictwo G) i części urojone (podatność B) w formie graficznej.
Ryc. 2 pokazuje dwie różne reprezentacje cech dopuszczalności. Górna część to wykres charakterystyki przewodności / zawieszenia z częstotliwością, żółta linia przedstawia wykres charakterystyki B (S) - f, a czerwona linia to wykres charakterystyki G (S) - f. Dolna połowa to płaszczyzna wektora admitancji, odcięta jest przewodnością G (rzeczywistą częścią admitancji), a rzędna jest podatnością B (urojoną częścią admitancji), która pokazuje, jak zmienia się ona z częstotliwością.
Charakterystyka zmienności dopuszczalnej urządzenia.
Gdy częstotliwość sygnału zmienia się w zakresie wokół częstotliwości rezonansowej (rezonans szeregowy), trajektorią wektora Y1 jest okrąg, którego środkiem jest (1 / 2R1, 0), a promień wynosi 1 / 2R1.
Gdy trajektoria wektora Y1 wokół częstotliwości rezonansowej zostanie obrócona o jedną rundę, wektor Y0 zmienia się zasadniczo wraz z częstotliwością i może być uważany za stały. Dlatego okrąg trajektorii Y1 jest przesuwany wzdłuż osi podłużnej na płaszczyźnie przyjęcia. Krąg trajektorii admitancji Y można uzyskać w funkcji częstotliwości, tak zwanego koła admitancji.
Za pomocą wykresu dopuszczalności można uzyskać równoważny obwód urządzenia piezoelektrycznego i inne ważne parametry.
(1) Fs: Częstotliwość rezonansu mechanicznego, to znaczy częstotliwość robocza układu wibracyjnego, powinna być możliwie zbliżona do oczekiwanej wartości w projekcie. W przypadku maszyny czyszczącej im wyższa spójność częstotliwości rezonansowej wibratora, tym lepiej. W przypadku spawaczy tworzyw sztucznych lub obróbki ultradźwiękowej, jeśli konstrukcja klaksonu lub formy jest nieuzasadniona, częstotliwość rezonansowa wibratora będzie odchylać się od punktu pracy.
(2) Gmax: Przewodnictwo w rezonansie szeregowym, wartość przewodności podczas działania układu wibracyjnego, która jest odwrotnością oporu dynamicznego R1. Im większy, tym lepszy w tych samych warunkach wsparcia, Gmax = 1 / R1. Zasadniczo w przypadku czyszczenia lub spawania wibratorów wynosi ona między około 50 mS a 500 mS. Jeśli jest on zbyt mały, ogólnie wibrator lub układ wibracyjny mogą mieć problemy, takie jak niedopasowanie obwodu lub niska wydajność konwersji oraz krótka żywotność wibratora.
(3) C0: Pojemność gałęzi statycznej w równoważnym obwodzie urządzenia piezoelektrycznego, C0 = CT-C1 (gdzie: CT jest wolną pojemnością przy 1 kHz, a C1 jest pojemnością gałęzi dynamicznej w równoważnym obwodzie urządzenie piezoelektryczne). Podczas użytkowania wyważyć C0 za pomocą indukcyjności. W projekcie obwodu pralki lub maszyny do obróbki ultradźwiękowej odpowiednie zrównoważenie C0 może zwiększyć współczynnik mocy zasilacza. Istnieją dwie metody wykorzystania balansu cewki indukcyjnej, strojenia równoległego i strojenia szeregowego.
(4) Qm: mechaniczny współczynnik jakości, określony metodą krzywej przewodnictwa, Qm = Fs / (F2-F1), im wyższa Qm, tym lepiej, ponieważ im wyższa Qm, tym wyższa wydajność wibratora; ale Qm musi pasować do zasilacza, Qm Gdy wartość jest zbyt wysoka, zasilacz nie może się równać.
Do czyszczenia wibratora, im wyższa wartość Qm, tym lepiej. Ogólnie rzecz biorąc, Qm wibratora czyszczącego powinna osiągnąć 500 lub więcej. Jeśli jest za niska, sprawność wibratora jest niska.
W przypadku obróbki ultradźwiękowej wartość Qm samego wibratora wynosi na ogół około 500. Po dodaniu klaksonu na ogół osiąga około 1000 plus forma, ogólnie osiągając 1500-3000. Jeśli jest zbyt niska, wydajność wibracji jest niska, ale nie powinna być zbyt wysoka, ponieważ im wyższa Qm, tym węższa robocza szerokość pasma, trudno jest dopasować twardy zasilacz, trudno jest zasilać punkt częstotliwości rezonansowej, a urządzenie nie może działać.
(5) F2, F1: częstotliwość połowy mocy wibratora. Dla całego układu wibracyjnego (w tym klaksonu i formy) do obróbki ultradźwiękowej F2-F1 jest większy niż 10 Hz, w przeciwnym razie pasmo częstotliwości jest zbyt wąskie, zasilacz jest trudny do pracy w punkcie częstotliwości rezonansowej, a urządzenie nie mogę pracować.
F2-F1 jest bezpośrednio związany z wartością Qm, Qm = Fs / (F2-F1).
(6) Fp: częstotliwość antyrezonansowa (głównie rezonans generowany przez C0 i L1), częstotliwość rezonansowa równoległej gałęzi piezoelektrycznego wibratora. Przy tej częstotliwości impedancja wibratora piezoelektrycznego jest największa, a dopuszczalność - najmniejsza.
(7) Zmax: impedancja antyrezonansowa. W normalnych warunkach impedancja antyrezonansowa przetwornika przekracza kilkadziesiąt kiloomów. Jeśli impedancja antyrezonansowa jest stosunkowo niska, żywotność wibratora jest często krótka.
(8) CT: Pojemność swobodna, wartość pojemności urządzenia piezoelektrycznego przy 1 kHz. Ta wartość jest zgodna z wartością zmierzoną przez cyfrowy miernik pojemności. Ta wartość minus dynamiczny kondensator C1 może uzyskać rzeczywistą pojemność statyczną C0, C0 musi być zrównoważone przez zewnętrzny cewkę indukcyjną, C1 uczestniczy w konwersji energii podczas pracy układu, nie ma potrzeby równoważenia.
(9) Opór dynamiczny R1: Jest to opór połączenia szeregowego wibratorów piezoelektrycznych na rysunku. Wzór jest następujący: R1 = 1 / D, gdzie D jest średnicą koła admitancji.
(10) Indukcyjność dynamiczna L1: Jest to indukcyjność gałęzi szeregowej wibratora piezoelektrycznego na rysunku.
Wzór obliczeniowy jest następujący: L1 = R1 / 2π (F2-F1), gdzie R1 to opór dynamiczny, a F1 i F2 to połowa mocy.
(11) Pojemność dynamiczna C1: Jest to pojemność gałęzi szeregowej wibratora piezoelektrycznego na rysunku.
Wzór obliczeniowy jest następujący: C1 = 1 / 4π 2 Fs 2 L1, gdzie Fs jest częstotliwością rezonansową, a L1 jest indukcyjnością dynamiczną.
(12) Pojemność statyczna C0: Wzór obliczeniowy to C0 = CT-C1, gdzie CT jest pojemnością swobodną, a C1 jest pojemnością dynamiczną.
(13) Keff: efektywny elektromechaniczny współczynnik sprzężenia. Mówiąc ogólnie, im wyższy Keff, tym wyższa wydajność konwersji.
Osoba kontaktowa: Ms. Hogo Lv
Tel: 0086-15158107730
Faks: 86-571-88635972

